ドローンの衝突回避に係わる技術開発のための飛行実験
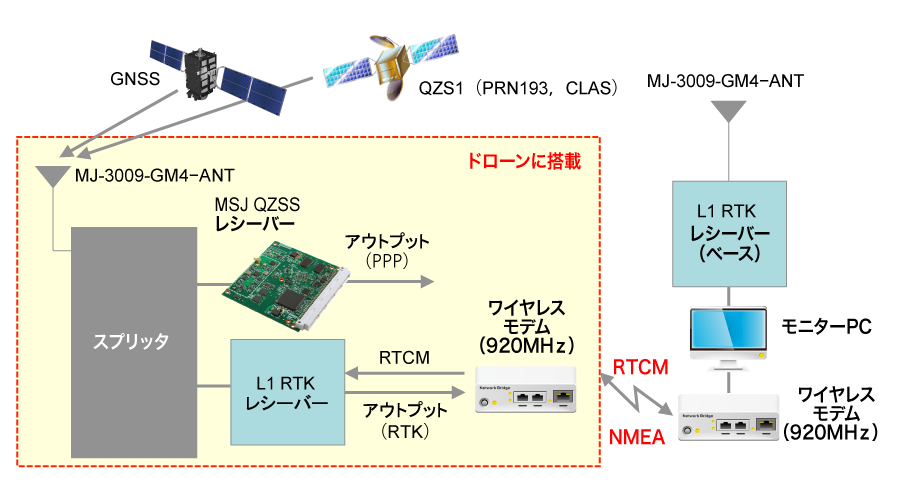
測定構成
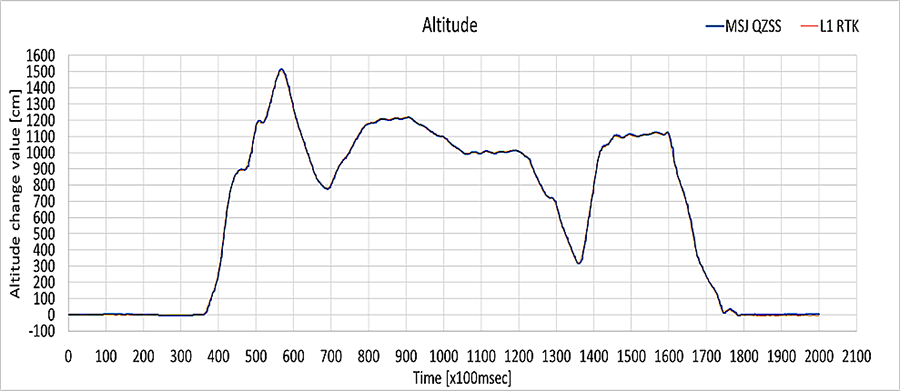
高度調査結果
高度調査の結果は、GZSSを用いたPPP測位(高精度単独測位)とL1信号によるRTK測位(相対測位)の差はほとんどみられません
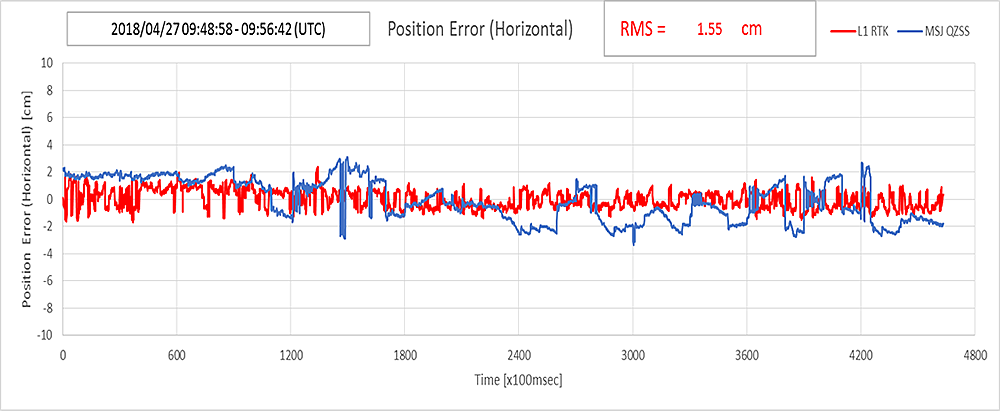
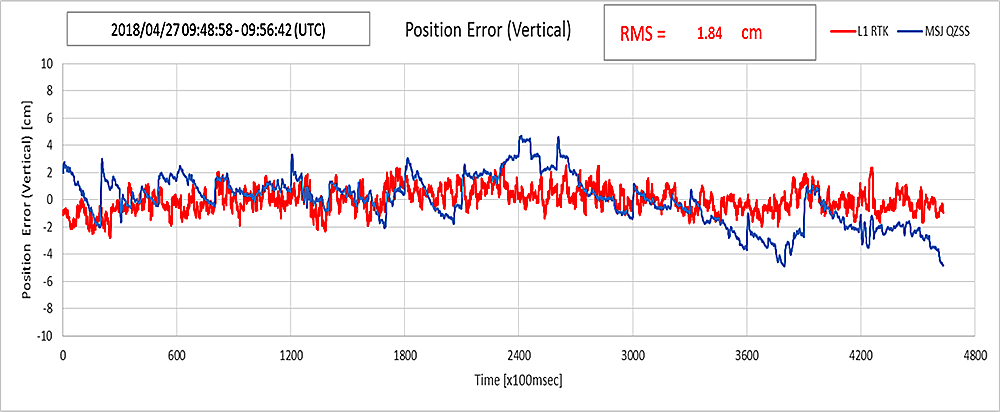
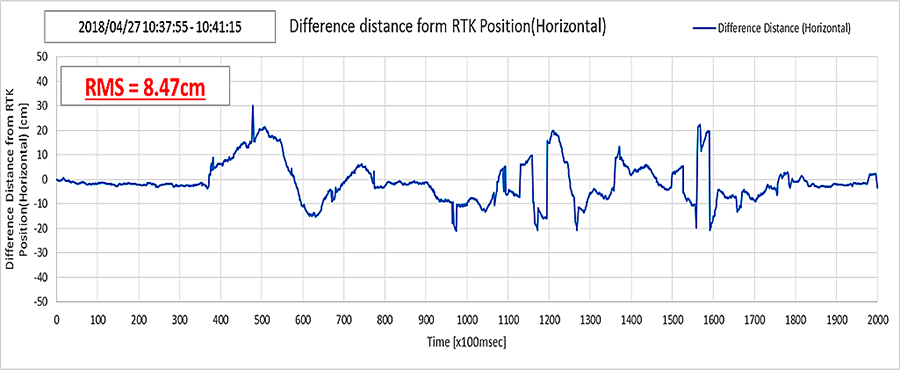
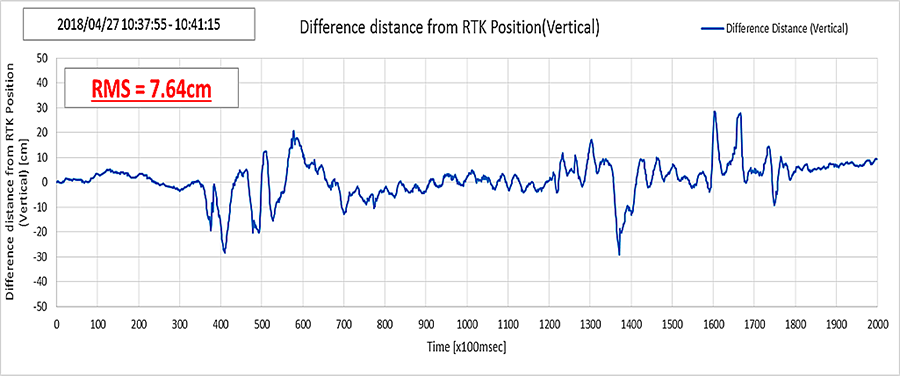
水平および垂直調査結果
水平および垂直調査でからもPPP測位でRTK測位とほぼ同じ精度を保持しています。
高精度単独測位での高精度位置情報を利用し、ドローン相互の位置情報を認識することで、過密空域での飛行や複数機利用システムが可能になります。

ドローン搭載状態でのQZSS対応高精度受信機の精度検証
調査結果
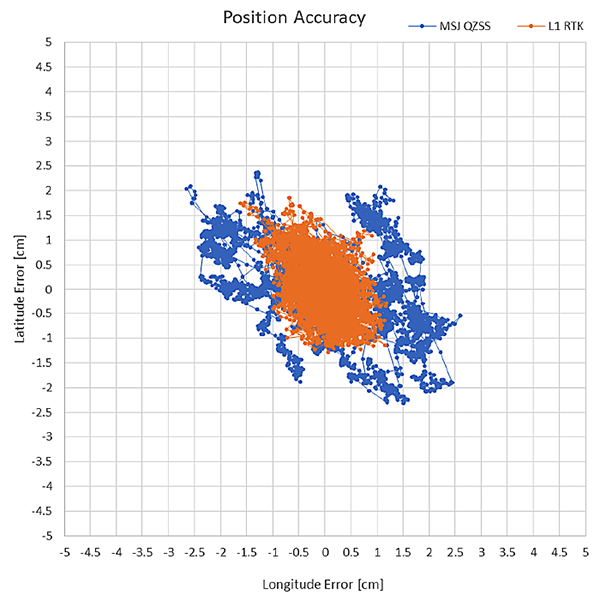
マゼランQZSS
水平=1.55cm(RMS)、垂直=1.84cm(RMS)
L1 RTK
水平=0.69cm(RMS)、垂直=0.88cm(RMS)
水平・垂直ともに、高精度単独測位とRTK相対測位では、差は数ミリ単位であることが分かります。
調査結果
地上でのアイドリング時の位置精度は、水平方向で1.55cm(RMS)、垂直方向で1.84cm(RMS)であり、CLASを利用したPPPの要求精度水平方向3.47cm(RMS)、垂直方向 6.13cm(RMS)を満足しています。