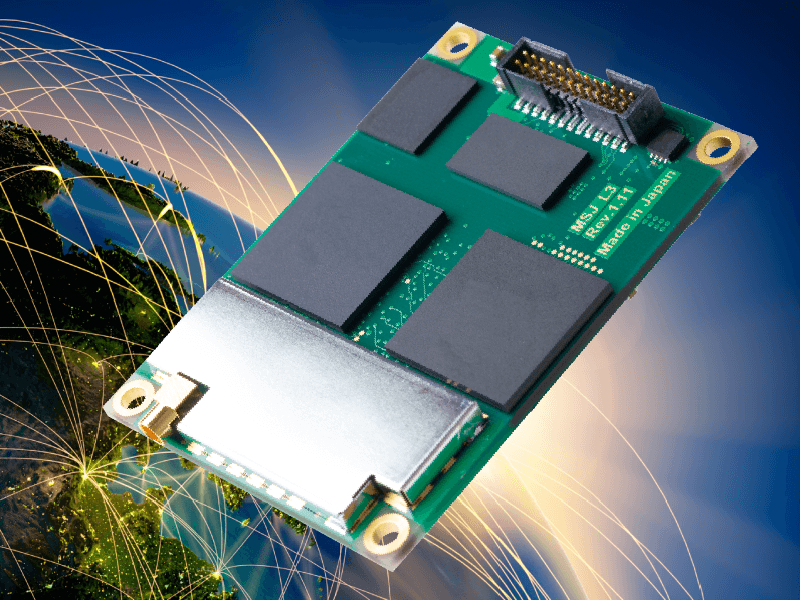
みちびき(QZSS)対応
多周波マルチGNSS受信モジュール(ディスクリート版)
準天頂衛星みちびき(QZSS)の
L6信号を受信し、
高精度かつ単独測位が可能な
次世代型受信モジュールのディスクリートモデル
※本製品は2019年7月1日より申し込みの受付を行っております。
製品の特徴
PPP(高精度単独測位)方式に対応
2018年に本格稼働した準天頂衛星「みちびき」からのL6信号を受信し、高精度かつ単独測位が可能な次世代受信機です。L6信号のCLAS方式に対応することで、PPP(高精度単独測位)方式のデメリットであるとされていた長い収束時間を短縮することができます。
また、RTKに代表される従来の高精度測位に必要であった基準局を利用しなくても車の自動走行などに必要な高精度位置情報を受信機単独で得ることができます。
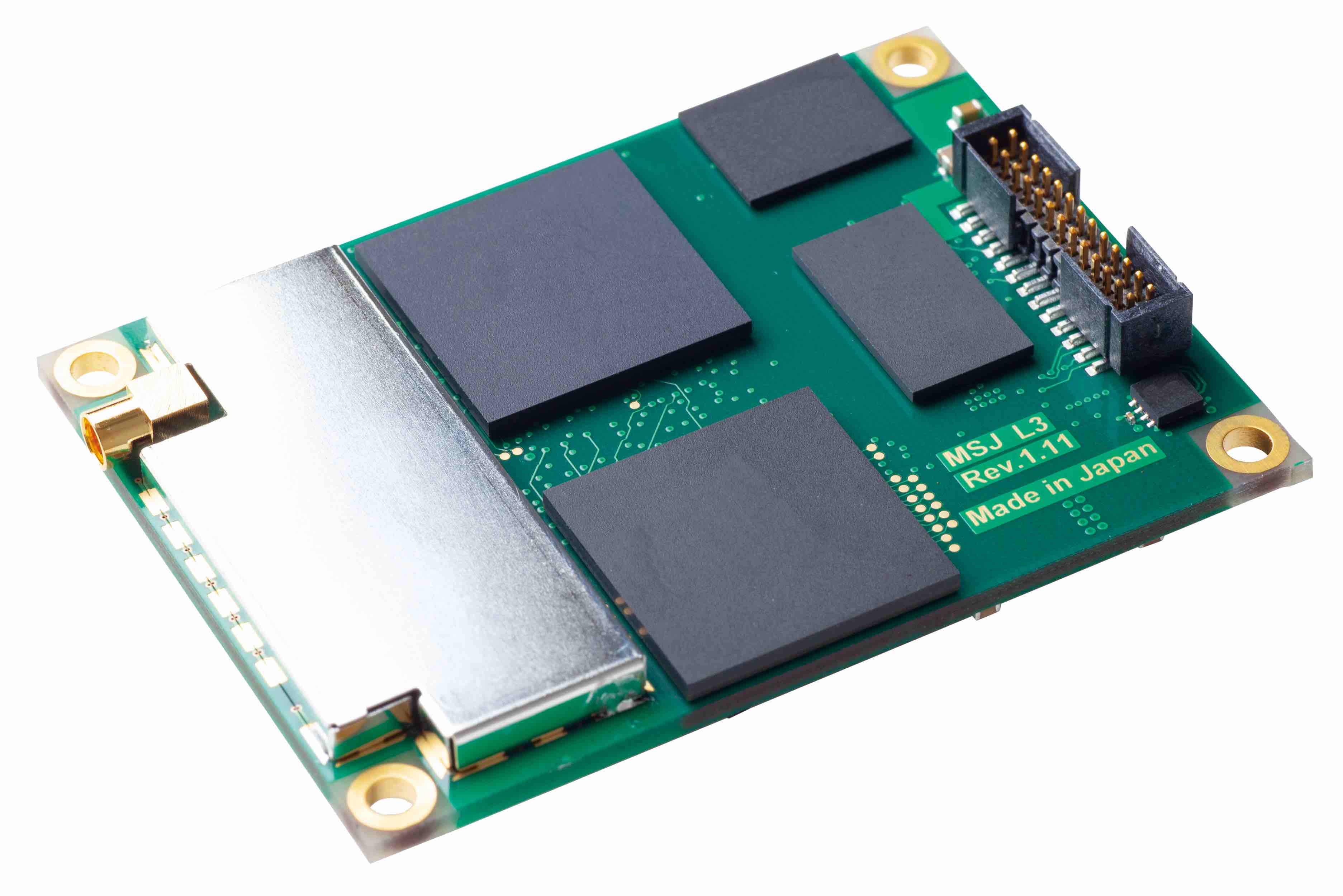 MJ-2014-GM4
MJ-2014-GM4
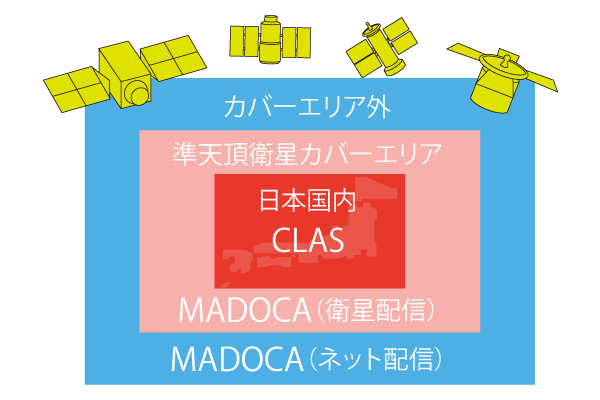
世界初、CLASとMADOCAダブル対応
ハイスペック設計により、各国の衛星システムに対応しています。利用可能な衛星数が増えることで、PPP測位においても高精度な測位状態を安定して維持します。また、測位補強システムである「CLAS」と「MADOCA」の双方に世界で初めて対応した受信機であり、PPP方式の測位が日本でも海外でも使用可能です。
さらに、地上の基準点からの補正情報を利用した高精度多周波マルチGNSS RTK受信機としても利用できます。
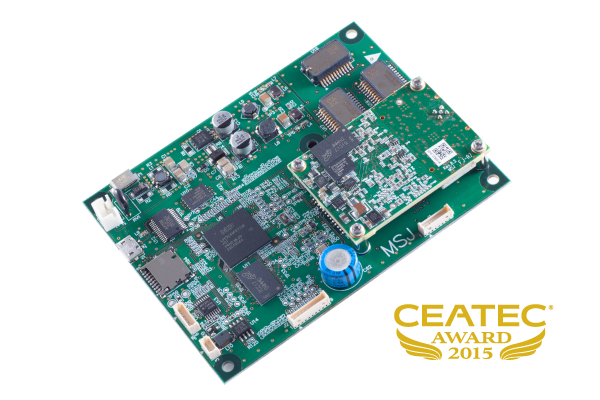
多周波対応+独自のIMUによる高度カップリング技術
一般的な単独測位を行うカーナビやスマートフォンは、1周波コード測位を行っており、その精度は5~10m程度です。それに対し、本受信機ではRTK方式に対応しており、複数の異なった周波数の信号を利用することで、電離層による電波遅延誤差をキャンセルすることができ、搬送波測位によりセンチメートル級の精度が実現できます。
さらに、VRS(仮想基準点)方式にも対応しており、準天頂衛星を活用したセンチメートル級測位には必須の受信方式です。
また、独自のIMU(慣性演算ユニット)との高度カップリング技術により、農機等の自動運転に必要なセンチメートル級測位を可能にしました。
※写真はLIマルチGNSSモジュール+IMUです
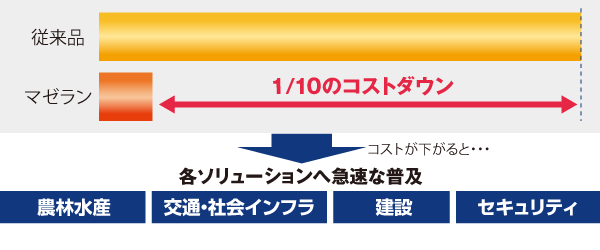
高精度でありながら低価格を実現
従来のネットワーク型高精度RTK受信機のコストを劇的に低減。従来品の1/10以下を実現しました。
海外メーカーが高シェアを誇る分野に、国内製品である本製品が誕生したことで、産業活性化に繋がる可能性が高まります。
技術の優位性
- GPS、QZSSやGLONASSを利用した複数周波数による高精度測位用アルゴリズム
- GPS、QZSSのL1+L2による搬送波測位が可能な観測データを出力するための受信機内部アルゴリズム
- QZSSのL6帯の信号捕捉と追尾及びデコードされた情報を利用した実際のPPP-RTK(高精度単独測位)演算を行う技術
- 昨今注目されているPPP-AR(RTKと同様に搬送波位相の整数バイアスを解く)に関する要素技術。従来のPPPと比較すると精度(水平RMS)10cmから2〜3cmへ改善
仕様
| 項目 |
仕様 MJ-2014-GM4 |
||
|---|---|---|---|
| 捕捉衛星・信号 | GPS | L1C/A,L1P,L2P | |
| QZSS | L1C/A,L2C,L6 | ||
| GLONASS | G1,G2 | ||
| Galileo | E1,E5a | ||
| Beidou | B1C,B2a | ||
| 位置精度(RMS) | 自律測位 | 1.5m(typical) | |
| RTK(リアルタイムキネマティック) | 動的 | <5cm+0.7ppm×Baseline(<30km) | |
| 静的 | <0.5cm+0.7ppm×Baseline(<30km) | ||
| PPP(MADOCA)*2 | <10cm | ||
| PPP-RTK(CLAS)*3 | 動的 | <6.94cm | |
| 静的 | <3.47cm | ||
| TTFF *1 (Autonomous) |
コールド・スタート | 90秒(typical) | |
| ウォーム・スタート | 35秒(typical) | ||
| ホット・スタート | 12秒(typical) | ||
| 衛星再捕捉時間 | 4秒(typical) | ||
| 寸法 |
43×59×10mm |
||
| 重さ | 20g | ||
| 入力電圧 | 4.5 ~ 6 VDC | ||
| バックアップ電圧 | 2.6 ~ 4 VDC | ||
| 消費電力 | 3.5W以下 | ||
| アンテナ出力 | 4V、30mA | ||
| コネクタ | 26 pins for digital / MMCX for antenna | ||
| 動作温度 | -30℃〜+85℃ | ||
| 最大出力レート | 最大50Hz | ||
| 入出力インタフェース | LV-TTL UART×2 | ||
| データフォーマット | NMEA0183 Version 3.0(Output) / RTCM SC104 Version 3.1,3.2 (MSM3,4,5,7)(Input/Output) | ||
*1:Time to First Fix(初期位置算出時間)*2:MADOCAの仕様による *3:CLASの仕様による
※製品の仕様は予告なく変更することがあります。
活用分野
 測量
測量
 農林水産業
農林水産業
 建設業界
建設業界
 船舶の安全航行
船舶の安全航行
 物流業界
物流業界
 ドローン
ドローン
